see: https://europe.naverlabs.com/research/computer-vision/proxy-virtual-worlds-vkitti-2/
Virtual KITTI 2 is a more photo-realistic and better-featured version of the original virtual KITTI dataset. It exploits recent improvements of the Unity game engine and provides new data such as stereo images or scene flow.
1. Dataset Statistics
The Virtual KITTI 2 dataset has $21,260$ stereo pairs in total, including (where each scene represents a location):
- Scene01: $4,470$, crowded urban area;
- Scene02: $2,330$, road in urban area then busy intersection;
- Scene06: $2,700$, stationary camera at a busy intersection;
- Scene18: $3,390$, long road in the forest with challenging imaging conditions and shadows;
- Scene20: $8,370$, highway driving scene.
2. Format Description
SceneX/Y/frames/rgb/Camera_Z/rgb_%05d.jpg SceneX/Y/frames/depth/Camera_Z/depth_%05d.png SceneX/Y/frames/classsegmentation/Camera_Z/classgt_%05d.png SceneX/Y/frames/instancesegmentation/Camera_Z/instancegt_%05d.png SceneX/Y/frames/backwardFlow/Camera_Z/backwardFlow_%05d.png SceneX/Y/frames/backwardSceneFlow/Camera_Z/backwardSceneFlow_%05d.png SceneX/Y/frames/forwardFlow/Camera_Z/flow_%05d.png SceneX/Y/frames/forwardSceneFlow/Camera_Z/sceneFlow_%05d.png SceneX/Y/colors.txt SceneX/Y/extrinsic.txt SceneX/Y/intrinsic.txt SceneX/Y/info.txt SceneX/Y/bbox.txt SceneX/Y/pose.txt
where X ∈ {01, 02, 06, 18, 20} and represent one of 5 different locations. Y ∈ {15-deg-left, 15-deg-right, 30-deg-left, 30-deg-right, clone, fog, morning, overcast, rain, sunset} and represent the different variations. Z ∈ [0, 1] and represent the left (same as in virtual kitti) or right camera (offset by 0.532725m to the right). Note that our indexes always start from 0.
3. Depth $z$
All depth images are encoded as Grayscale 16bit PNG files.We use a fixed far plane of $655.35$ meters (pixels farther away are clipped; however, it is not relevant for this dataset).
This allows us to truncate and normalize the $z$ values to the $[0, 2^{16} – 1]$ integer range such that a pixel intensity of $1$ in our single channel PNG16 depth images corresponds
to a distance of $1$ cm to the camera plane.The depth map in centimeters can be directly loaded in Python with numpy and OpenCV via the one-liner (assuming “import cv2”):
depth = cv2.imread(depth_png_filename, cv2.IMREAD_ANYCOLOR | cv2.IMREAD_ANYDEPTH)
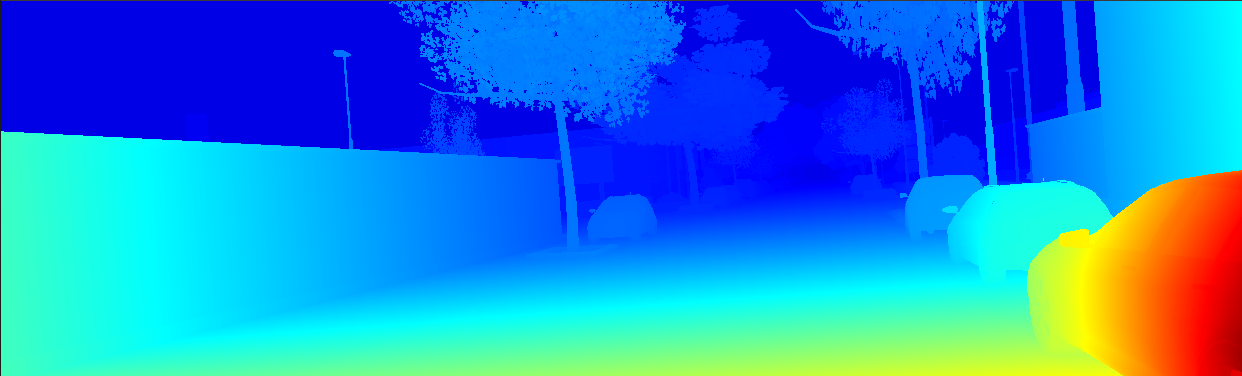
4. Disparity $d$
Based on $d = fB/z$, we can get the disparity $d$. By checking the intrinsic.txt files, I find $f = 725.0087$, $B = 53.2725$ (cm), and the depth png files contain the $z$ values in centimeters.
So to get the disparity maps, I just run $d=fB/z$ ( since I find no zero-value of depth $z$).
For example, we show Virtual-KITTI-V2/vkitti_2.0.3_rgb/Scene01/15-deg-left/frames/rgb/Camera_0/rgb_00001.jpg and Virtual-KITTI-V2/vkitti_2.0.3_rgb/Scene01/15-deg-left/frames/rgb/Camera_1/rgb_00001.jpg.
- stereo pair (move mouse on it to see the right view):

-
disparity:
- class segmentation:
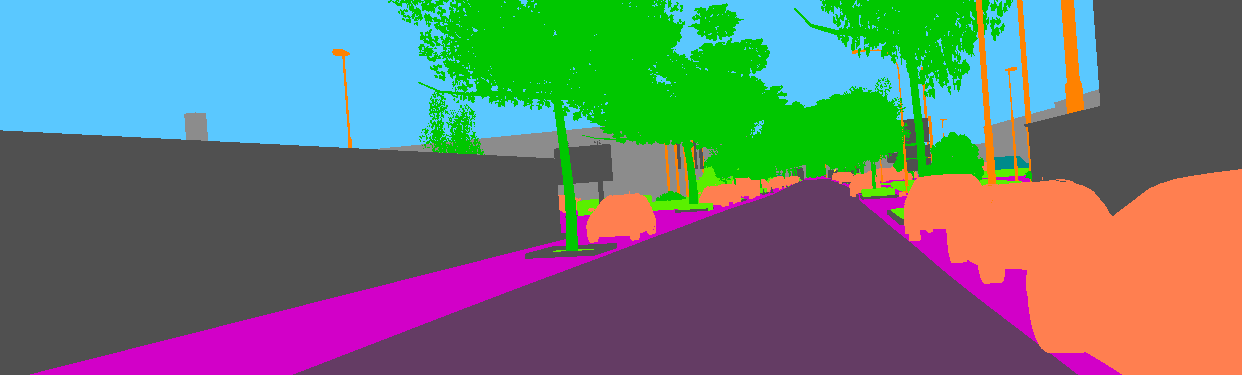
5. Class Segmentation
I find the colors.txt file has 15 colors or classes in total.
from collections import namedtuple
# a label and all meta information
Label = namedtuple( 'Label' , [
'name' , # The identifier of this label, e.g. 'car', 'person', ... .
# We use them to uniquely name a class
'id' , # An integer ID that is associated with this label.
# The IDs are used to represent the label in ground truth images
# An ID of -1 means that this label does not have an ID and thus
# is ignored when creating ground truth images (e.g. license plate).
# Do not modify these IDs, since exactly these IDs are expected by the
# evaluation server.
'color' , # The color of this label
] )
virtual_kitti_2_labels = [
# name id color
Label( 'undefined' , 0 , ( 0, 0, 0) ),
Label( 'terrain' , 1 , (210, 0, 200) ),
Label( 'sky' , 2 , ( 90, 200, 255) ),
Label( 'tree' , 3 , ( 0, 199, 0) ),
Label( 'vegetation' , 4 , ( 90, 240, 0) ),
Label( 'building' , 5 , (140, 140, 140) ),
Label( 'road' , 6 , (100, 60, 100) ),
Label( 'guard rail' , 7 , (250, 100, 255) ),
Label( 'traffic sign' , 8 , (255, 255, 0) ),
Label( 'traffic light' , 9 , (200, 200, 0) ),
Label( 'pole' , 10 , (255, 130, 0) ),
Label( 'misc' , 11 , (80, 80, 80) ),
Label( 'truck' , 12 , (160, 60, 60) ),
Label( 'car' , 13 , (255, 127, 80) ),
Label( 'van' , 14 , (0, 139, 139) ),
]
6. Train-Test Split for Stereo Matching Experiments
Maybe there are three plans for train/test split:
- 1) mix up all of them, then randomly select $3,000$ pairs (i.e., $14\%$) as test set,
- 2) randomly choose $14\%$ from each scene category for testing set, or
- 3) keep one scene, like Scene06 as test set.
Which one do you prefer? I find no specification of the train/test split on the official website.
My solution for stereo matching experiments:
- 1) Hold Scene06 back, which will not be used in our experiments.
- 2) choose first $86\%$ frames from each scene category among the remaining ones (i.e., Scene 01, 02, 18 and 20) for training set, and hence the last $14\%$ frames for validation (or test) set.
resulting in a training set of $15,940$ images (see the file list virtual_kitti2_wo_scene06_fixed_train.list); and a testing set of $2,620$ images (see the file list virtual_kitti2_wo_scene06_fixed_test.list).